HOME
A self-balancing robot with a tail-like component
Nature is one of the greatest sources of inspiration for engineers and computer scientists developing new technological tools. Over the past decade or so, roboticists have developed countless robots inspired by the behavior and biological mechanisms of snakes, fish, cheetahs, birds, insects and countless other animals.
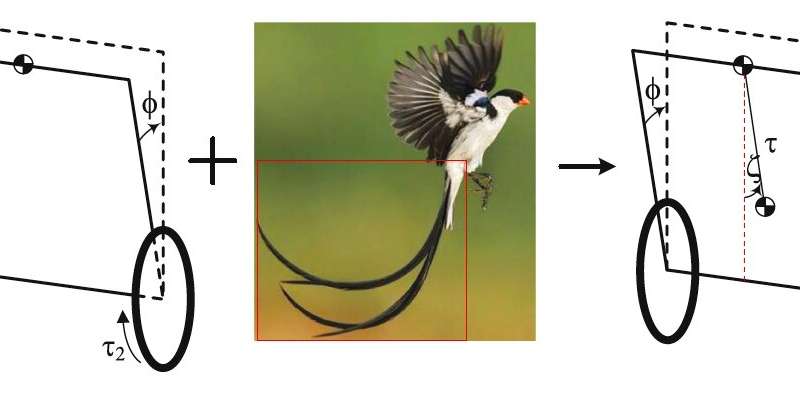
Researchers at Beijing Institute of Technology recently designed a new bio-inspired robot that can maintain its balance using a tail-like mechanism. This robot, presented in a paper published in Springer's Proceedings of 2020 Chinese Intelligent Systems Conference, is made up of a main body, two wheels and the tail-inspired component that helps it to retain its balance.
The robot's 'tail' is controlled by an adaptive hierarchical sliding mode controller, which allows it to rotate in different directions within an area parallel to the robot's wheels. Essentially, this controller defines and implements the movements of the tail-like component, ensuring that they enhance the robot's stability as it navigates its surrounding environment.
To allow the robot to keep its balance as it moves in dynamic or changing environments, the controller uses estimates of uncertainty. The artificial 'tail' moves in specific patterns that are designed to increase the robot's stability and are calculated using the so-called Lyapunov stability theorem. Lyapunov stability is a theoretical construct that describes the stability of dynamic systems, introduced by Russian mathematician and physicist Aleksandr Lyapunov.
News Source